En un artículo anterior instalamos Ubuntu 12.04 y un escritorio para el Beaglebone Black, ahora probamos OpenCV para ir hacia proyectos mas avanzados.
![]()
Tras el salto los detalles
Materiales
- Beaglebone Black con Ubuntu 12.04
- Acceso a Internet
- Fuente de Poder 5V @ 1A
- Cable de Red
- WebCam Logitech C270
Procedimiento
Para probar la compatibilidad con la camara usamos el software GUVCViwer que se instala con el siguiente comando
sudo apt-get install guvcviewer
Ahora se siguen los siguientes pasos, Apagar el Beaglebone Black con sudo shutdown -h now
Conectar la cámara.
Habilitar el escritorio remoto con vncserver
Abrir vnc viewer en el notebook
En el escritorio remoto ejecutar el siguiente comando
sudo guvcviewer
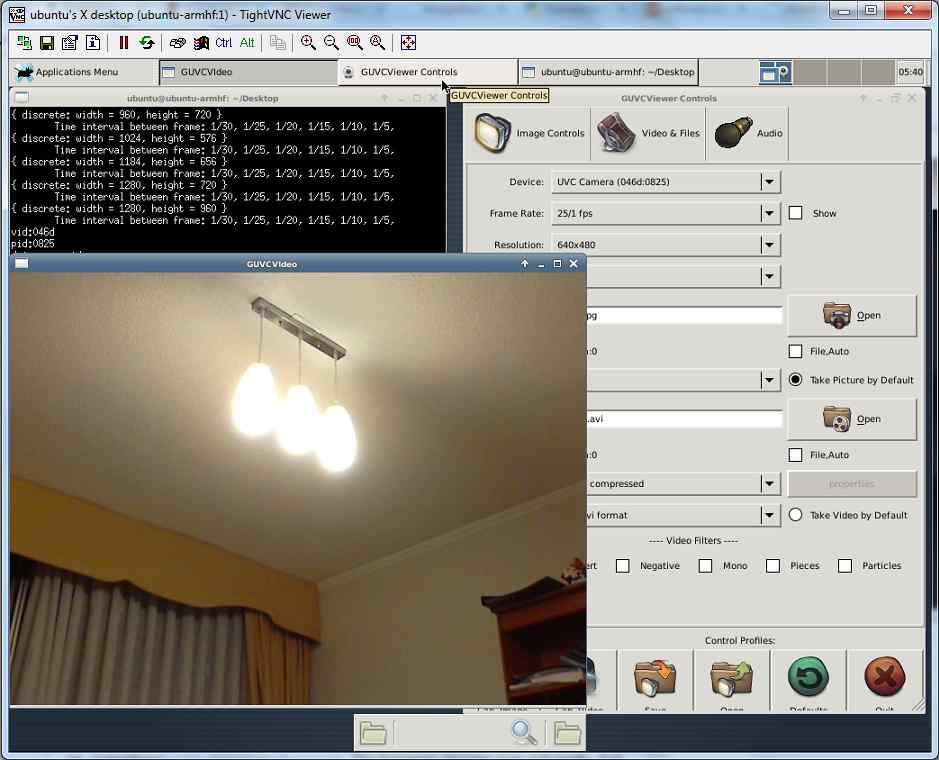
Se puede ver una serie de controles, para obtener la imagen o video esperado. En caso que no se vea una imagen se recomienda modificar el valor de Video&Files -> Resolution. La siguiente imagen muestra el resultado típico de este programa, mostrando una cámara que funciona sin problemas.
Ahora viene la instalación de OpenCV propiamente tal. Los comandos son
sudo apt-get install build-essential sudo apt-get install libavformat-dev sudo apt-get install ffmpeg sudo apt-get install libcv2.3 libcvaux2.3 libhighgui2.3 sudo apt-get install python-opencv sudo apt-get install opencv-doc sudo apt-get install libcv-dev sudo apt-get install libcvaux-dev sudo apt-get install libhighgui-dev
ahora creamos la carpeta ejemplo
mkdir ejemplo
y movemos los ejemplos a esa carpeta
sudo cp -r /usr/share/doc/opencv-doc/examples/ ejemplo
Instalamos numpy para usar en OpenCV
sudo apt-get install python-numpy
sudo nano ejemplo/examples/python/camera.py
Editar este archivo para que quede de esta manera
import cv2.cv as cv
import time
cv.NamedWindow("camera", 1)
capture = cv.CaptureFromCAM(0)
cv.SetCaptureProperty(capture, 3, 360)
cv.SetCaptureProperty(capture, 4, 240)
while True:
img = cv.QueryFrame(capture)
cv.ShowImage("camera", img)
if cv.WaitKey(10) == 27:
break
Lo que se modifica son las propiedades de la cámara, forzando un tamaño. Ahora desde el escritorio remoto, usar el comando
sudo python camera
Para obtener la siguiente imagen
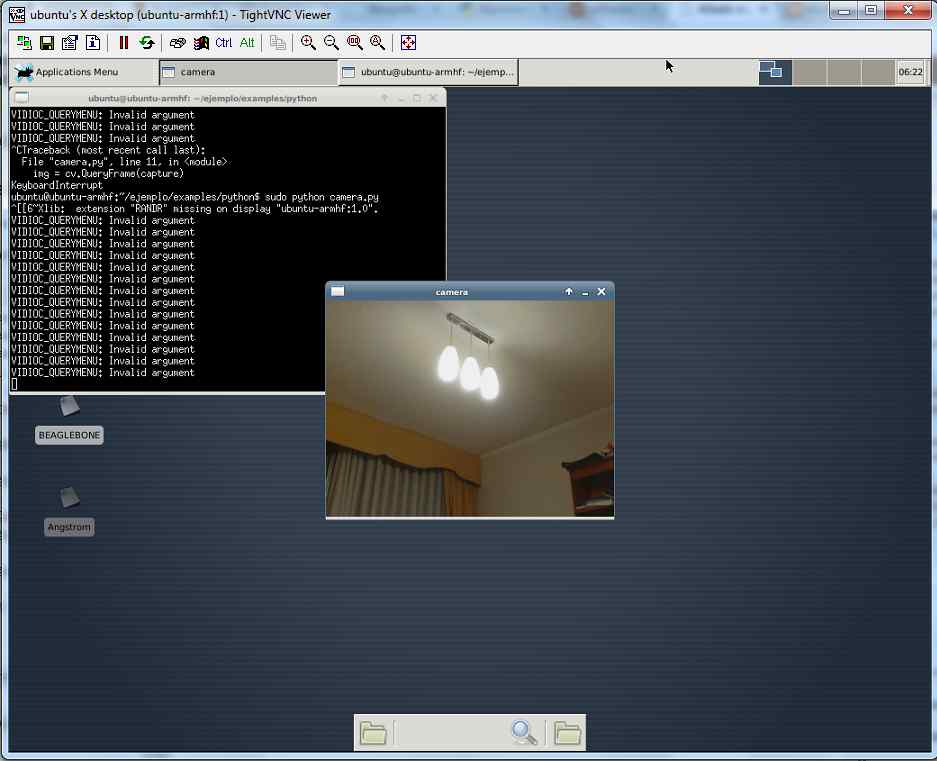
Con los pasos anteriores tenemos una instalación funcional de OpenCV
Bibliografía
Grimmett, Richard, «Beaglebone Robotic Projects», Packt Publishing 2013
One thought